三菱 LIMI-STOPモータの調整 [ポストミシン]
ミシンも調子が出てきたので、針位置の調整です。
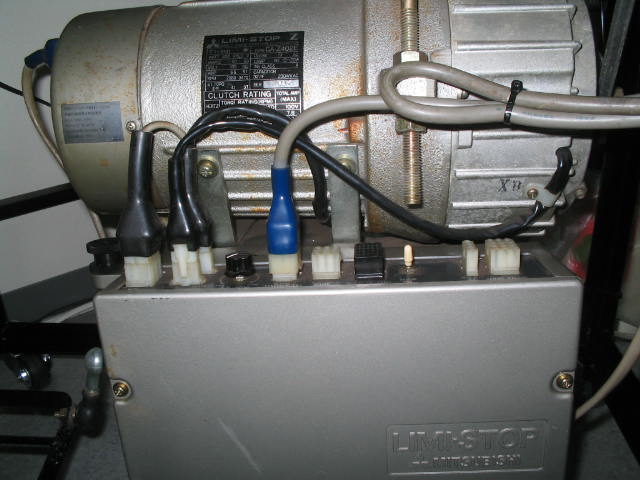
今回使用しているモータはLIMI-STOP外観からするとサーボモータの様ですが、クラッチモータをマイコン制御しています。
まずは、針位置調整です。
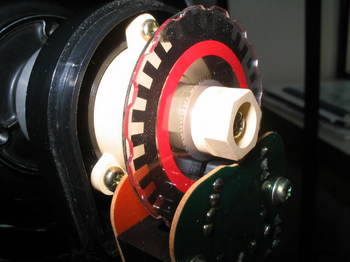
回転センサー内のエンコーダーで調整

ケースの下側を引っ張って開く

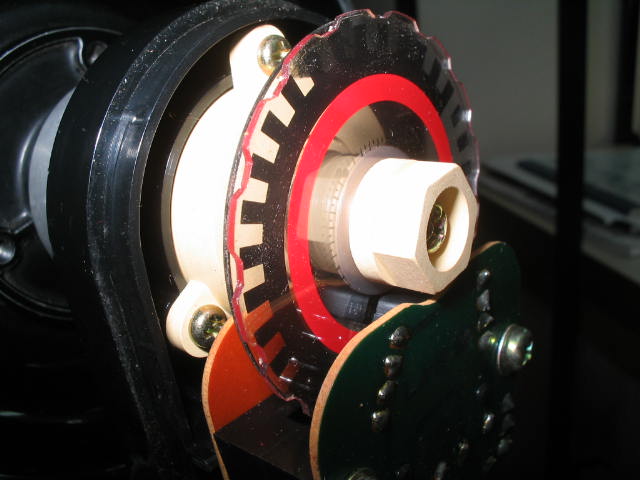
エンコーダーのフィルムは2枚構成です。
赤いエンコーダーが針の下止まり位置です。
私の場合、針が完全に落ちた位置では不安(やり直しがきかない)なので、はりが下りて、材料にチョコット刺さった位置で止めました。 これでチョット戻せばやり直しができます。
針の上がり位置は黒いエンコーダーで調整、天秤が伸びきったところに設定しました。
このモータは回転方向を電源の取り口コネクターの方向で設定します。
ミシン台組み立て時に逆回転してビックリでした。

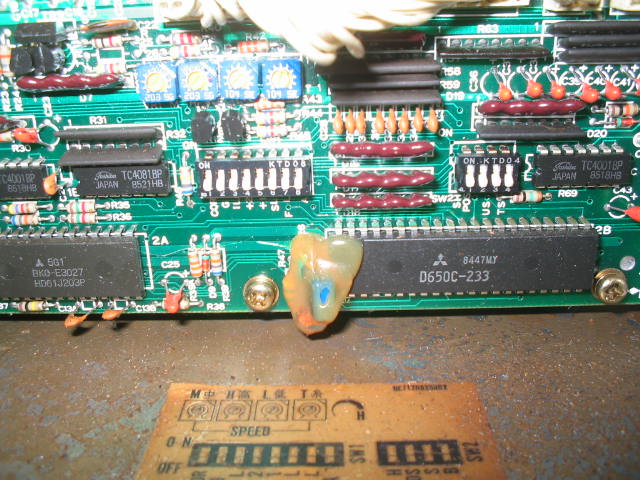
スピード調整
内部の基盤で設定します。

正面のパネルを外すと基盤が出てきます。
真ん中の半固定抵抗の左から、中速、高速、低速、糸
たぶん、ペダルの踏み込みが3段階になっており、その各ステップの調整と思われますが、中速の調整がうまく出来ませんでした。 低速、中速、高速を半時計方向一杯に再調整
これで低速は1針づつ、高速はボックスのSPEEDボリュームで制御できます。

音はうるさいですが、とことこ走るモーター
サーボモーターの1/3の価格で取引されていますね!
このモータの存在は知りませんでした! hihi
追記:2009年7月10日
電源オンでモータが回転
針の停止位置は制御されています。
追記:2009年7月29日
ミシン用モーターについて
工業用のミシンに使用しているモーターは一般的に400wの様です。
一般的にはクラッチモーター 回転しているモーターに足踏みのクラッチで回転をつなげる また逆に踏む事でブレーキをかける。
ここに紹介しているモーターは回転しているモーターに足踏みの電気信号でクラッチをコントロールして、ミシン本体に取り付けたセンサーにより針の位置を検出して、指定した位置で停止する
サーボモーターはここに紹介しているモーターと同様でモータ自身の回転を制御するため、停止時にモーターも止まり、騒音の少ない作業が出来る。
私の分かった範囲でのモーターの特性の違いです。
今回使用しているモータはLIMI-STOP外観からするとサーボモータの様ですが、クラッチモータをマイコン制御しています。
まずは、針位置調整です。
回転センサー内のエンコーダーで調整

ケースの下側を引っ張って開く

エンコーダーのフィルムは2枚構成です。
赤いエンコーダーが針の下止まり位置です。
私の場合、針が完全に落ちた位置では不安(やり直しがきかない)なので、はりが下りて、材料にチョコット刺さった位置で止めました。 これでチョット戻せばやり直しができます。
針の上がり位置は黒いエンコーダーで調整、天秤が伸びきったところに設定しました。
このモータは回転方向を電源の取り口コネクターの方向で設定します。
ミシン台組み立て時に逆回転してビックリでした。

スピード調整
内部の基盤で設定します。
正面のパネルを外すと基盤が出てきます。
真ん中の半固定抵抗の左から、中速、高速、低速、糸
たぶん、ペダルの踏み込みが3段階になっており、その各ステップの調整と思われますが、中速の調整がうまく出来ませんでした。 低速、中速、高速を半時計方向一杯に再調整
これで低速は1針づつ、高速はボックスのSPEEDボリュームで制御できます。
音はうるさいですが、とことこ走るモーター
サーボモーターの1/3の価格で取引されていますね!
このモータの存在は知りませんでした! hihi
追記:2009年7月10日
電源オンでモータが回転
ダウンロードは🎥こちら
針の停止位置は制御されています。
ダウンロードは🎥こちら
追記:2009年7月29日
ミシン用モーターについて
工業用のミシンに使用しているモーターは一般的に400wの様です。
一般的にはクラッチモーター 回転しているモーターに足踏みのクラッチで回転をつなげる また逆に踏む事でブレーキをかける。
ここに紹介しているモーターは回転しているモーターに足踏みの電気信号でクラッチをコントロールして、ミシン本体に取り付けたセンサーにより針の位置を検出して、指定した位置で停止する
サーボモーターはここに紹介しているモーターと同様でモータ自身の回転を制御するため、停止時にモーターも止まり、騒音の少ない作業が出来る。
私の分かった範囲でのモーターの特性の違いです。





いつもナイス有難うございます。
どうしても、電気的な方向に行ってしまいますね!
by nobuki (2009-06-29 13:36)