パイピング用 押さえ金具(CS-GFTM) [上下送り平ミシン]
今日も朝からいい天気ですね!
バック作りにはパイピングが必須になりますね!
上下送りのミシンなので、一般的な押さえ金具はあきらめていたのですが、探せばあるものですね!
早速、テスト縫いです。
驚くほどうまく縫えるものですね!
■下送り歯より広い巾ですね

■パイピングを縫う時はカーブの際を進めていくのですが、革が厚いため、パイプに近づいたり、遠くになったり、バラツキが出てしまいました。

■直線縫いでは、外側の送り歯にのみ材料が乗ってしまします。
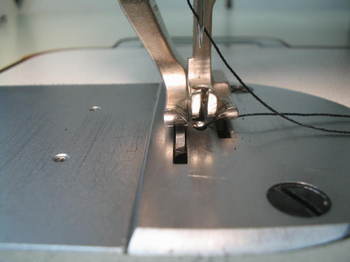
■これなら、パイプをガイドにワキをしっかり縫い付けられます

■均一な縫いあがりに満足です。


ヤッパ道具は選ばなければ。。。。
追記:2010年9月28日
ミシンの布送りの種類
1)下送り 一般的ミシンは下送りです。 上の押さえ金具の下で布を滑らせます。
2)上下送り 上押さえも布を送ります。送り歯が上にも付いている
3)総合送り 上下送りも下送りと同様の押え金具で布を一部滑らせているのですが、
総合送りは針を含めて、送り動作を行います。
バック作りにはパイピングが必須になりますね!
上下送りのミシンなので、一般的な押さえ金具はあきらめていたのですが、探せばあるものですね!
早速、テスト縫いです。
驚くほどうまく縫えるものですね!
■下送り歯より広い巾ですね

■パイピングを縫う時はカーブの際を進めていくのですが、革が厚いため、パイプに近づいたり、遠くになったり、バラツキが出てしまいました。

■直線縫いでは、外側の送り歯にのみ材料が乗ってしまします。
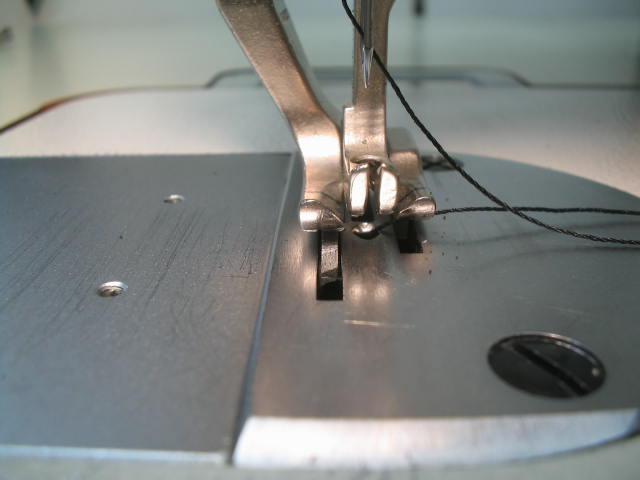
■これなら、パイプをガイドにワキをしっかり縫い付けられます

■均一な縫いあがりに満足です。


ヤッパ道具は選ばなければ。。。。
追記:2010年9月28日
ミシンの布送りの種類
1)下送り 一般的ミシンは下送りです。 上の押さえ金具の下で布を滑らせます。
2)上下送り 上押さえも布を送ります。送り歯が上にも付いている
3)総合送り 上下送りも下送りと同様の押え金具で布を一部滑らせているのですが、
総合送りは針を含めて、送り動作を行います。
ミシン下糸調整 [上下送り平ミシン]
今日から天候が下り坂の様ですね!
明日は定休日なのに。。。
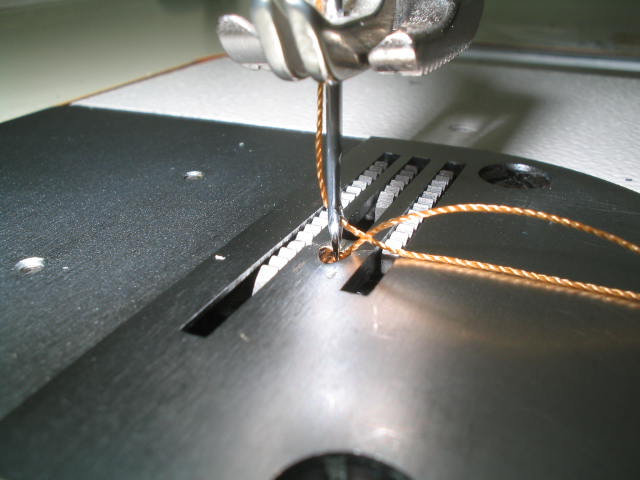
ミシンの下糸調整は基本と言われていますが、どの程度が適量か?
なかなか感覚がつかめません。
最近、糸の種類も増えてきて、下糸調整をする機会が増えてきました。
一般的に糸をつまんで軽くボビンケースを振って下にずり落ちる位が適当とされています。
軽く? 基本はこの方法として、簡易に計測できる簡単な冶具?を作って見ました。
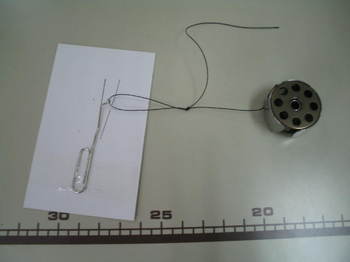
色々、スプリングを購入したり、台を考えたりしたのですが、これなら簡単、机の中に転がっているクリップとセロテープ、名刺でできます。
ボビンを固定して、糸を引いて、自分好みの強さに合わせます。(またもや感覚!)
下糸が一定のテンションになると、上糸の調整範囲が狭まり、トラブルの解消になります。
これで、ボビンケースを買い足す事がなくなれば、経済的ですね!
明日は定休日なのに。。。
ミシンの下糸調整は基本と言われていますが、どの程度が適量か?
なかなか感覚がつかめません。
最近、糸の種類も増えてきて、下糸調整をする機会が増えてきました。
一般的に糸をつまんで軽くボビンケースを振って下にずり落ちる位が適当とされています。
軽く? 基本はこの方法として、簡易に計測できる簡単な冶具?を作って見ました。
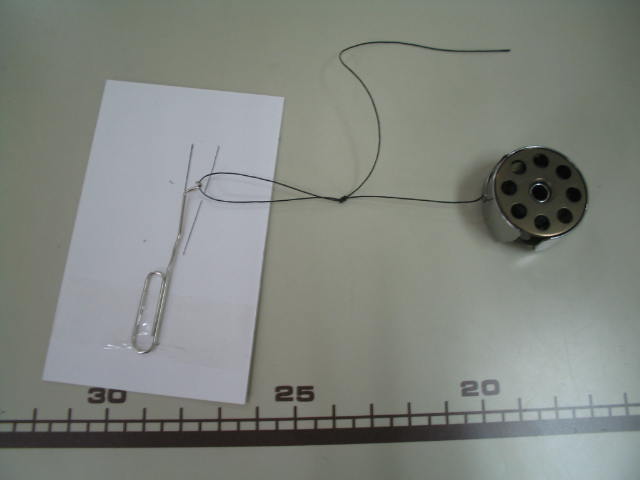
色々、スプリングを購入したり、台を考えたりしたのですが、これなら簡単、机の中に転がっているクリップとセロテープ、名刺でできます。
ボビンを固定して、糸を引いて、自分好みの強さに合わせます。(またもや感覚!)
下糸が一定のテンションになると、上糸の調整範囲が狭まり、トラブルの解消になります。
これで、ボビンケースを買い足す事がなくなれば、経済的ですね!
サーボモーター 針位置調整 [上下送り平ミシン]
今日も朝から曇り空、いつ雨が降っても不思議の無い天気ですね!
昨日はバイク通勤、ちょうど帰宅時間に大雨でした。
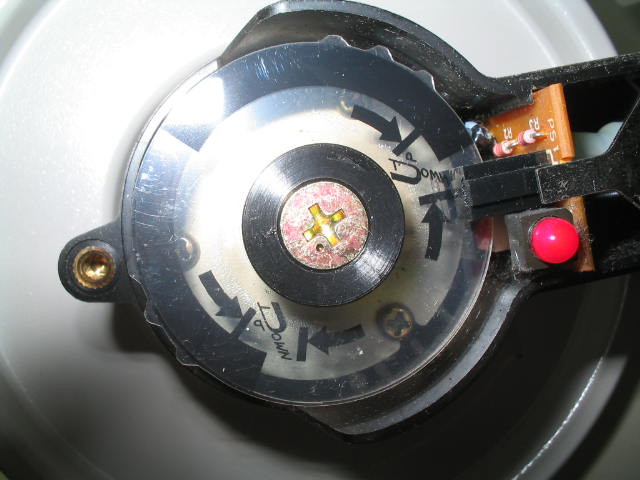
サーボモータの針位置調整です。
針が降りる位置調整はセンサーの角度で調整すれば良いのですが、針の上がり側は機種によって異なります。
そこで、調整作業です。
思った通り、ロータリーエンコーターが出てきました。
フイルムは2枚使用していて角度の変更が出来る様になっています。
角度調整をして完了です。
私は、下は一番下 上は天びんが一番糸を張った時にしました。
まずは、ケースのネジを外します。

針の下位置は透明から黒になってとまります。

針の上の位置は黒から透明になって止まります。
センターのネジを緩めて、フイルムの片側を固定して黒い範囲を変えて合わせていきます。

最後にネジを絞めて完了です。
これではずみ車に手を触れずに材料を取り出せます。
2009年7月6日 追記:
針の止まり位置の再調整しました。
慣れていない私にとっては、やはり針が進み過ぎてしまいます。
そこで、針の止まり位置を針の先端が材料に刺さった位置にしました。
回転が出来る程度に下りたところです。
針上がりは、天秤の張った位置としましたので、デコーダーの位置が合いません。
そこで、黒いテープを貼り付け調整しました。
針の止まり位置

コーダーの塗りつぶし状態

これで、針を落としても、針も持ち上げてやり直しができます。
針が下りる前に位置が予測できればよいのですが。。。。。。。。
昨日はバイク通勤、ちょうど帰宅時間に大雨でした。
サーボモータの針位置調整です。
針が降りる位置調整はセンサーの角度で調整すれば良いのですが、針の上がり側は機種によって異なります。
そこで、調整作業です。
思った通り、ロータリーエンコーターが出てきました。
フイルムは2枚使用していて角度の変更が出来る様になっています。
角度調整をして完了です。
私は、下は一番下 上は天びんが一番糸を張った時にしました。
まずは、ケースのネジを外します。

針の下位置は透明から黒になってとまります。

針の上の位置は黒から透明になって止まります。
センターのネジを緩めて、フイルムの片側を固定して黒い範囲を変えて合わせていきます。
最後にネジを絞めて完了です。
これではずみ車に手を触れずに材料を取り出せます。
2009年7月6日 追記:
針の止まり位置の再調整しました。
慣れていない私にとっては、やはり針が進み過ぎてしまいます。
そこで、針の止まり位置を針の先端が材料に刺さった位置にしました。
回転が出来る程度に下りたところです。
針上がりは、天秤の張った位置としましたので、デコーダーの位置が合いません。
そこで、黒いテープを貼り付け調整しました。
針の止まり位置
コーダーの塗りつぶし状態
これで、針を落としても、針も持ち上げてやり直しができます。
針が下りる前に位置が予測できればよいのですが。。。。。。。。
ミシン サーボモータ用センサー固定 [上下送り平ミシン]
今日は朝から雲がおおいですね!
このまま、梅雨にはいるのか?・・・・
ようやく、サーボモータ用のセンサーを固定しました。
回転はスムーズでリード線をテーブルにセロテープで仮止めしていたのですが。。。。
テーブルより支持ステーを出すと、下糸の巻き取りの邪魔になります。
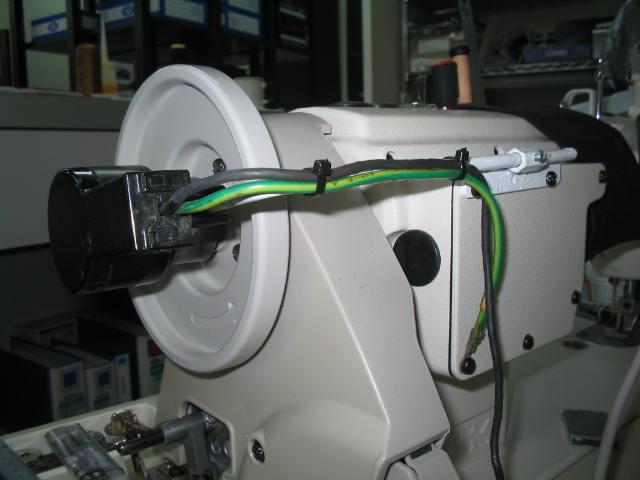
そこで、背面よりアームを出して固定してみました。
背面のカバーの上部の2本のネジを利用
6mmの通しボルト用のナットに6.5mmのバカ穴を空け、平板に溶接

背面から6mmの丸棒で支持
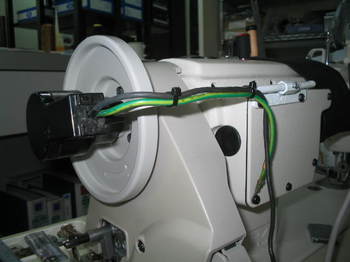
角度が調整できる様、3mmのイモネジで固定

下糸の巻き取り時の邪魔になりません

クラッチモータは電源オンでつねに回転しているので、チョットうるさかったのですが、サーボモーターは動作時のみの回転なのでとっても静かになりました。
メカ的な興味より、作品をつくらなければ。。。。。。。
このまま、梅雨にはいるのか?・・・・
ようやく、サーボモータ用のセンサーを固定しました。
回転はスムーズでリード線をテーブルにセロテープで仮止めしていたのですが。。。。
テーブルより支持ステーを出すと、下糸の巻き取りの邪魔になります。
そこで、背面よりアームを出して固定してみました。
背面のカバーの上部の2本のネジを利用
6mmの通しボルト用のナットに6.5mmのバカ穴を空け、平板に溶接

背面から6mmの丸棒で支持
角度が調整できる様、3mmのイモネジで固定

下糸の巻き取り時の邪魔になりません

クラッチモータは電源オンでつねに回転しているので、チョットうるさかったのですが、サーボモーターは動作時のみの回転なのでとっても静かになりました。
メカ的な興味より、作品をつくらなければ。。。。。。。
工業ミシン モーター交換 [上下送り平ミシン]
今日は朝からいい天気ですね!
ミシンのモータをクラッチ式からサーボ式に入れ替えました。
まずは、一定速度(上限設定)で動作するのがいいですね!
針の止まり位置も上、下が選択できます。
下に設定した時に、ペダルを逆に踏むと針を上げてくれます。
ブレーキを解除しておけば、手回しもできます。
便利、便利!
モータを交換すると、ベルトの長さが合いませんでした。
現在はM-41でしたが、M-39が必要となりました。
明日、調達予定です。
現在のクラッチ式モーター

交換したサーボモーター

取り付け状態

回転位置検知のエンコーダー

購入したものの、サーボ付きのミシンなど、見たことも無かったので、動作、取り付け方法といろいろ悩んでいましたが、流石に量産規格品、どうにかなるものですね!
バイクはそうはいかないな。。。
追記:検知部のエンコーダー取り付け
手回しのホイルの取り付け部分の軸にネジが切ってあります。

8mmの細ピッチのネジ(10mmも付属していました。)でセンサー取り付けアダプターを組み付けます。

組み立て

エンコーダー部分の印を下に取り付けました。(機種により??)

私の心配していた部分なので追記しておきます。
ミシンのモータをクラッチ式からサーボ式に入れ替えました。
まずは、一定速度(上限設定)で動作するのがいいですね!
針の止まり位置も上、下が選択できます。
下に設定した時に、ペダルを逆に踏むと針を上げてくれます。
ブレーキを解除しておけば、手回しもできます。
便利、便利!
モータを交換すると、ベルトの長さが合いませんでした。
現在はM-41でしたが、M-39が必要となりました。
明日、調達予定です。
現在のクラッチ式モーター

交換したサーボモーター

取り付け状態

回転位置検知のエンコーダー

購入したものの、サーボ付きのミシンなど、見たことも無かったので、動作、取り付け方法といろいろ悩んでいましたが、流石に量産規格品、どうにかなるものですね!
バイクはそうはいかないな。。。
追記:検知部のエンコーダー取り付け
手回しのホイルの取り付け部分の軸にネジが切ってあります。

8mmの細ピッチのネジ(10mmも付属していました。)でセンサー取り付けアダプターを組み付けます。

組み立て

エンコーダー部分の印を下に取り付けました。(機種により??)

私の心配していた部分なので追記しておきます。
裁縫道具 手元配置 [上下送り平ミシン]
今日も一日暑い日でしたね!
お盆の連休が始まり、通勤もスムーズになっています。
ミシンでの作業も必要な道具が固まってきました。
私は左利きなので、作業場の配置に苦労していました。
左手のとどく位置に、道具入れを設置してみました。


お盆の連休が始まり、通勤もスムーズになっています。
ミシンでの作業も必要な道具が固まってきました。
私は左利きなので、作業場の配置に苦労していました。
左手のとどく位置に、道具入れを設置してみました。


工業用ミシン 練習開始 [上下送り平ミシン]
きょうは朝から雨、ツーリングを予定していたライダーは残念ですね!
ようやく、欠品していたオイル、糸を入手して練習開始です。
まずは、操作と試し縫いですが、溶接の時も平板にビートを作る練習をしたのですが、
平板の練習では、肝心な溶接がうまくなりませんでした。
溶接の経験を生かし、はじめから、作品作りです。
電動ミシンは針が止まりません、積極的にブレーキを踏まないと2~3cmはオーバーして
しまいます。
ともかく、練習あるのみ!

ようやく、欠品していたオイル、糸を入手して練習開始です。
まずは、操作と試し縫いですが、溶接の時も平板にビートを作る練習をしたのですが、
平板の練習では、肝心な溶接がうまくなりませんでした。
溶接の経験を生かし、はじめから、作品作りです。
電動ミシンは針が止まりません、積極的にブレーキを踏まないと2~3cmはオーバーして
しまいます。
ともかく、練習あるのみ!

工業用ミシン導入 [上下送り平ミシン]
前から考えていたのですが、ついに導入しました。
JUKI DU-1181N

本職はもちろん、バイクのシートなど、いろいろ夢が広がります。
まずは、トレーニングから。。。。
JUKI DU-1181N

本職はもちろん、バイクのシートなど、いろいろ夢が広がります。
まずは、トレーニングから。。。。




